Paso 1: Descripción
El sensor ultrasónico HC-SR04 utiliza la velocidad del sonido para determinar la distancia a un objeto. Ofrece un excelente rango de medición con alta precisión y lecturas estables en un chip fácil de usar. La distancia medida va desde los 2 cm hasta los 400 cms.
La operación no se ve afectada por la luz solar o materiales negros (aunque los materiales blandos o telas acústicamente rugosas pueden ser difíciles de detectar). Este sensor cuenta con un emisor ultrasónico y el módulo receptor.
Paso 2: Características
- Fuente de alimentación: + 5V DC
- Corriente en reposo: < 2 mA
- Corriente Nominal: 15mA
- Ángulo Eficaz: <15 °
- Rango de Distancia: 2 cm – 400 cm / 1 – 13 pies
- Resolución: 0.3 cm
- Medición de ángulo: 30 grados
- Ancho de pulso de entrada: 10uS
- Dimensiones: 45mm x 20mm x 15mm
Paso 3: Pines a Conectar
- VCC: +5VDC
- Trig : Trigger (INPUT)
- Echo: Echo (OUTPUT)
- GND: GND
Paso 4: Actividad
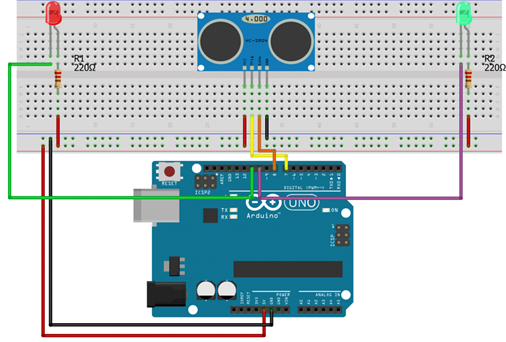
Este sensor es muy fácil de utilizar y muy amigable con el Arduino. La actividad a realizar es leer y escribir la distancia con el sensor ultrasónico y desplegar mediante 2 LEDs la proximidad de un objeto. Ejemplo: Se prende el primer LED cuando la distancia es menor a 10cm. Arriba de 10cm se prende el segundo LED. La distancia actual se verá reflejada en el Serial Monitor del programa Arduino.
Paso 5: Hardware
Paso 6: Software
#define trigPin 7
#define echoPin 8
#define led 11
#define led2 10
void setup() {
Serial.begin (9600);
pinMode(trigPin, OUTPUT);
pinMode(echoPin, INPUT);
pinMode(led, OUTPUT);
pinMode(led2, OUTPUT);
}
void loop() {
long duration, distance;
digitalWrite(trigPin, LOW);
delayMicroseconds(2);
digitalWrite(trigPin, HIGH);
delayMicroseconds(10);
digitalWrite(trigPin, LOW);
duration = pulseIn(echoPin, HIGH);
distance = (duration/2) / 29.1;
if (distance < 10) { // This is where the LED On/Off happens
digitalWrite(led,HIGH); // When the Red condition is met, the Green LED should turn off
digitalWrite(led2,LOW);
} else {
digitalWrite(led,LOW);
digitalWrite(led2,HIGH);
}
if (distance >= 400 || distance <= 0){
Serial.println("Out of range");
} else {
Serial.print(distance);
Serial.println(" cm");
}
delay(500);
}