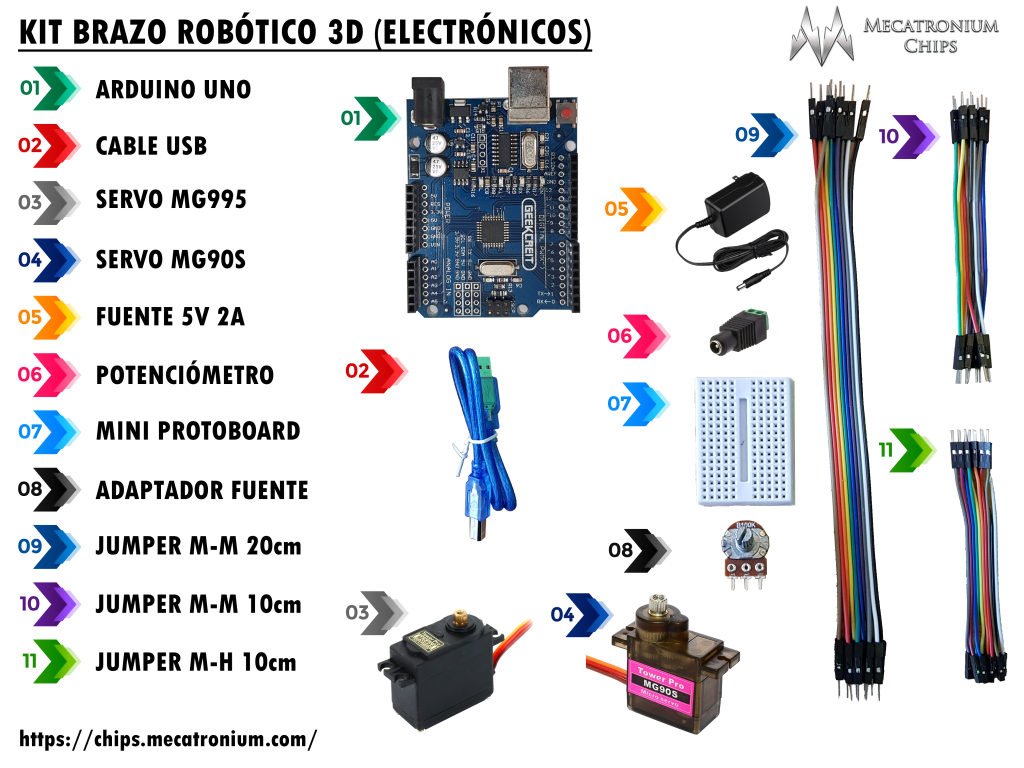
Componentes
Circuito


Código
Para este proyecto tenemos 3 archivos distintos de Arduino
- Servo_Posicion_Inicial – Utilizado para calibrar los servos a 90° antes de instalarlos.
- Servo_Control_Pot – Con este programa controlamos manualmente cada uno de los servomotores con su potenciómetro.
- Servo_Auto_Move – Con este programa podemos programar una secuencia automática para que el robot la siga.
Conclusión
En este proyecto construimos un brazo robótico el cual se encuentra listo para programarse. Al tener 3 ejes de rotación + un gripper (intercambiable) las posibilidades son limitadas únicamente por tu imaginación!
Nos encantaría ver lo que logras hacer, si tienes un video de tu robot en acción nos lo puedes compartir en los comentarios de abajo! Saludos!